Machine vision, AMR
Development of Machine Learning Based Object Position Estimation Method for Mobile Manipulators Gijun Han , Jaehong Shim, Kihyun Kim, Tae-Gon Kim, Hyo-Young Kim
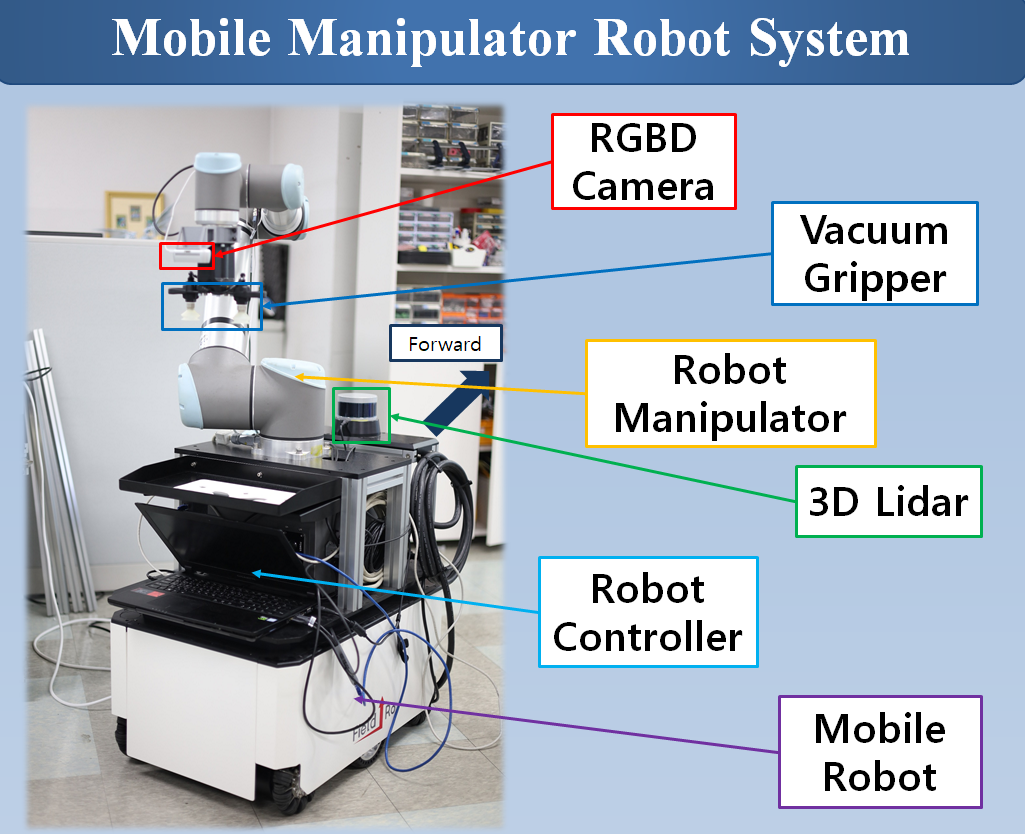
Mobile Manipulator Robot System
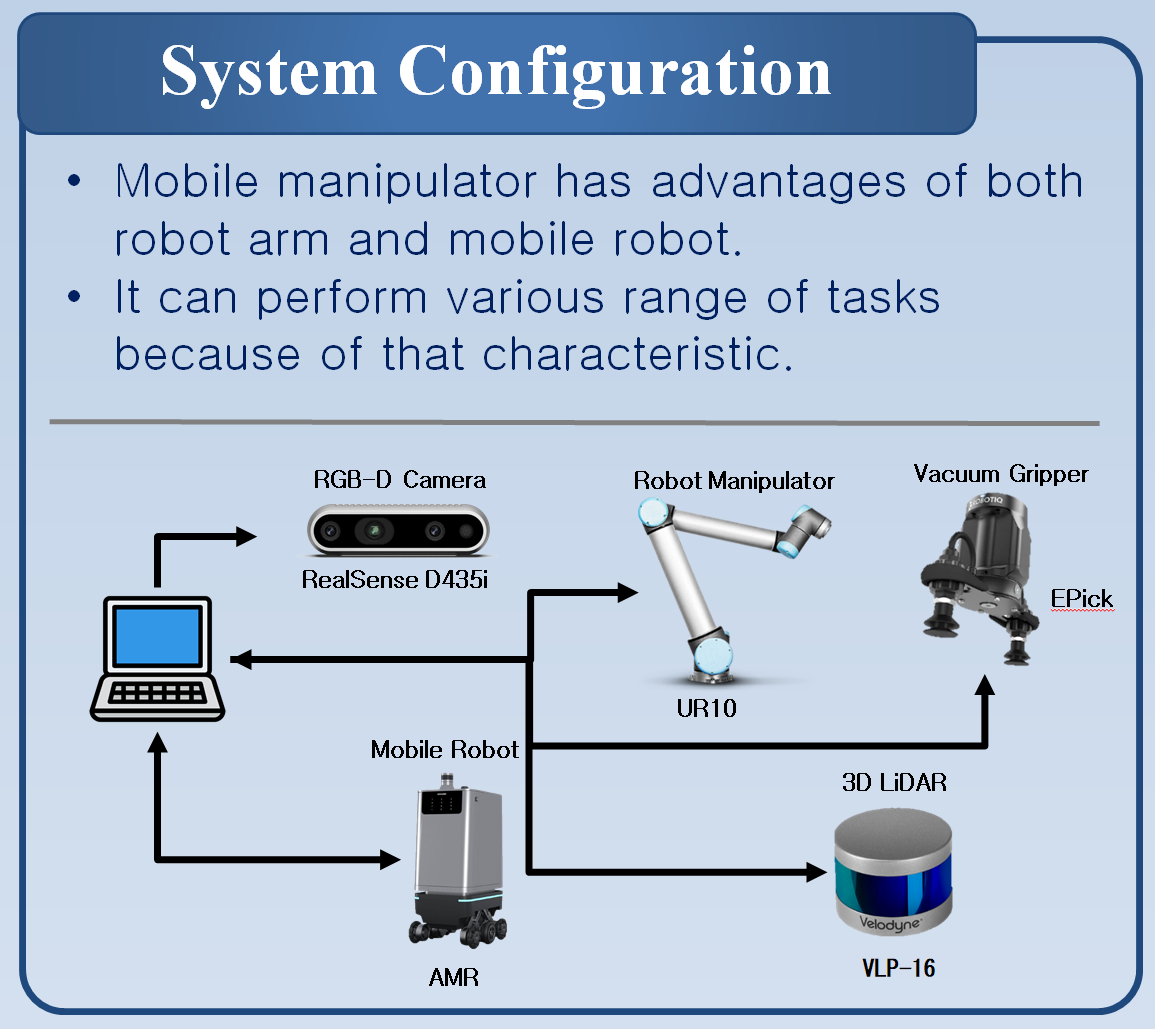
System Configuration
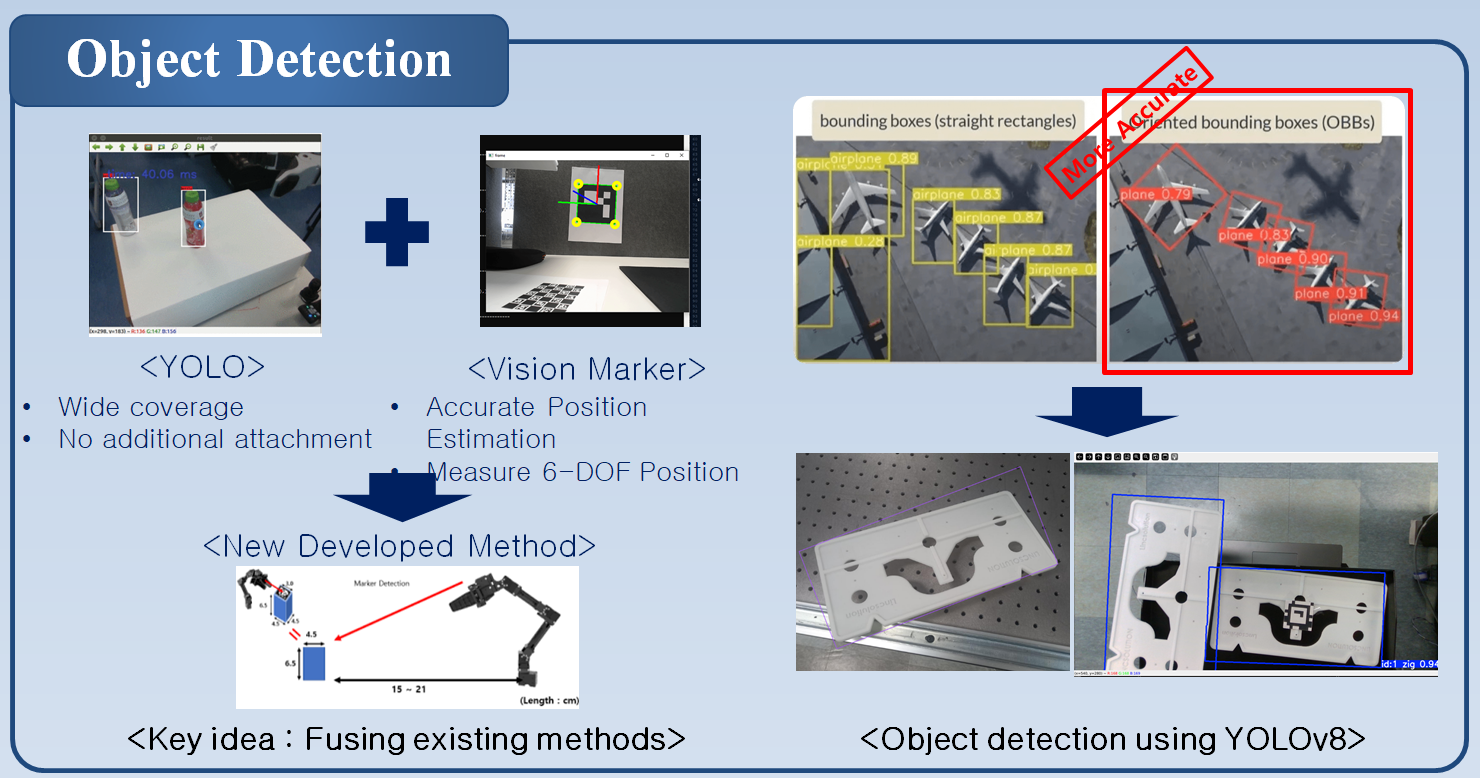
Object Detection
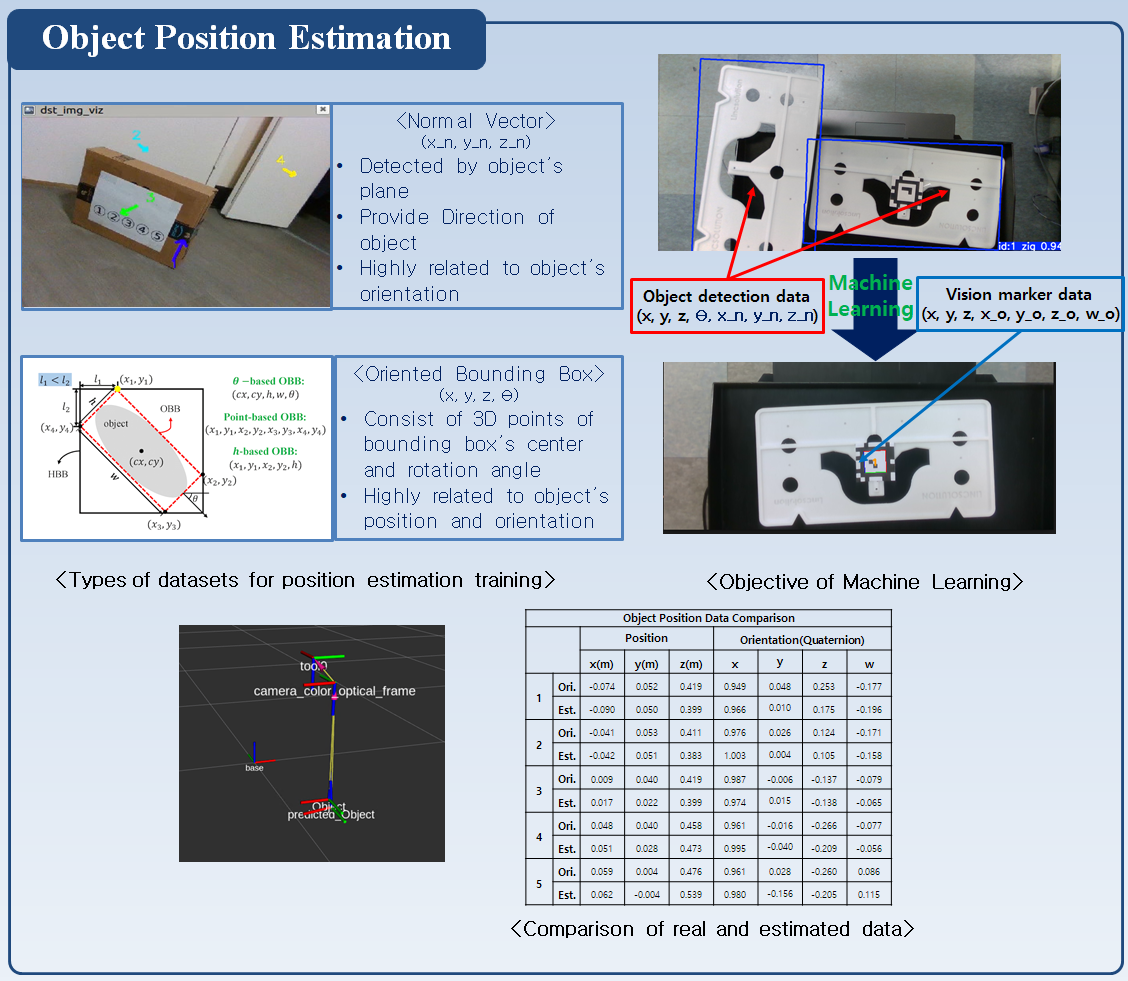
Object Position Estimation
GRRC PROJECT
Development of Robot Application Technology for the Automation of Double-Material Joint Manufacturing Process
- Gu Gyo-moon, Han Min-yong, Ahn Il-kyun, Kim Bum-jin, Kim Mi-jin, Shim Jae-hong, Kim Hyo-young, Kim Ki-hyun
(Korea University of Engineering)

Introduction
A Study on the Process of CFRP-Metal Joint Automation Unit
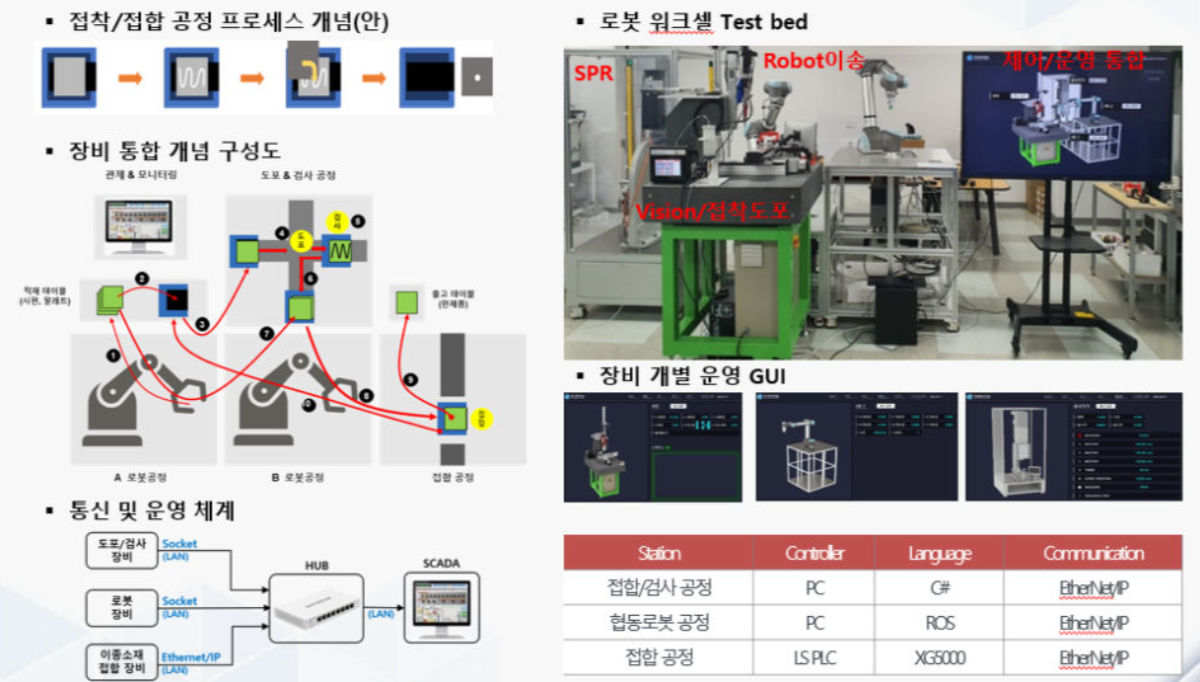
- - Development of a robot-based CFRP-metal hybrid bonding (bonding/gugging) and inspection/evaluation (vision) package automation system
- - Construction of automated manufacturing test bed for bonding of robot heterogeneous
- - Construction of basic robot database by process for automation system
- - A Basic Study on the Integration of Robot Processing-Junction System

Robot-based CFRC-Metal Heterogeneous Hybrid Bonding and Inspection, Evaluation (Vision) Package Automation
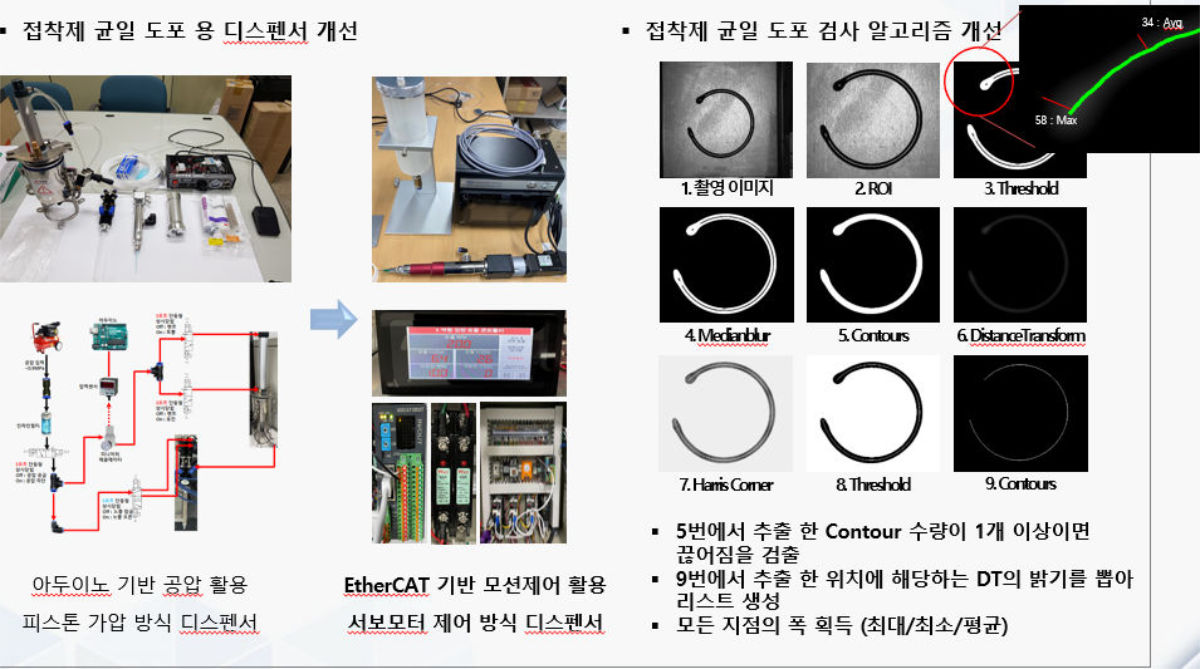
1. 균일 접차제 도포 및 검사 기술 개발
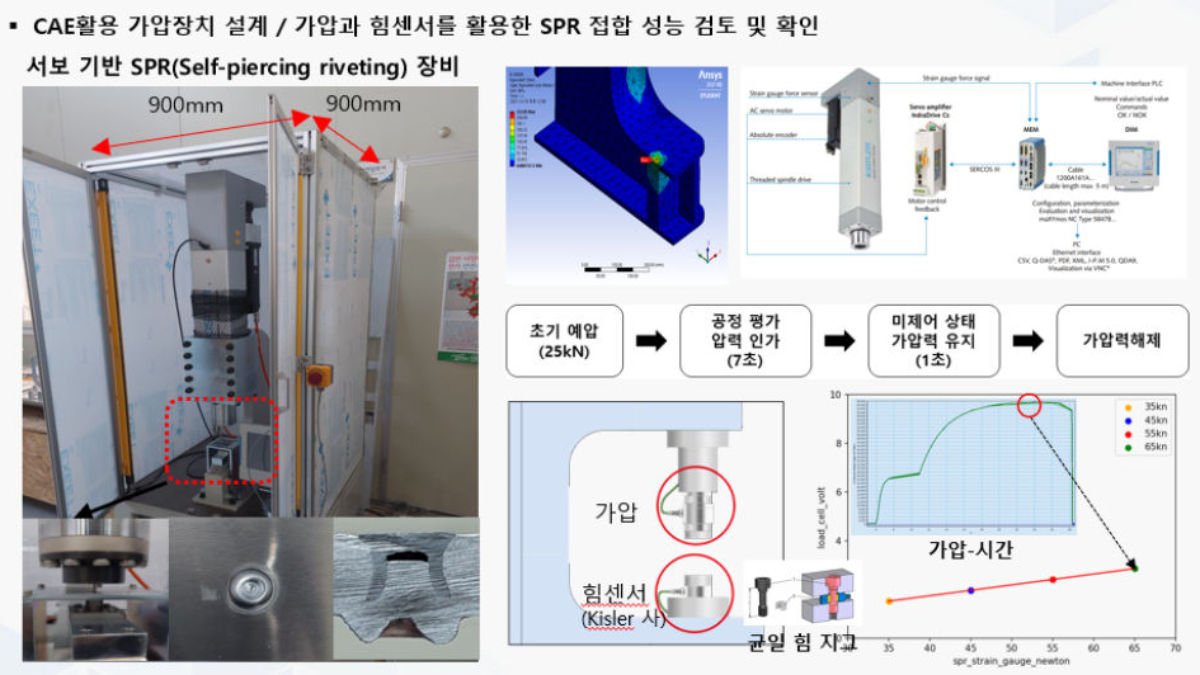
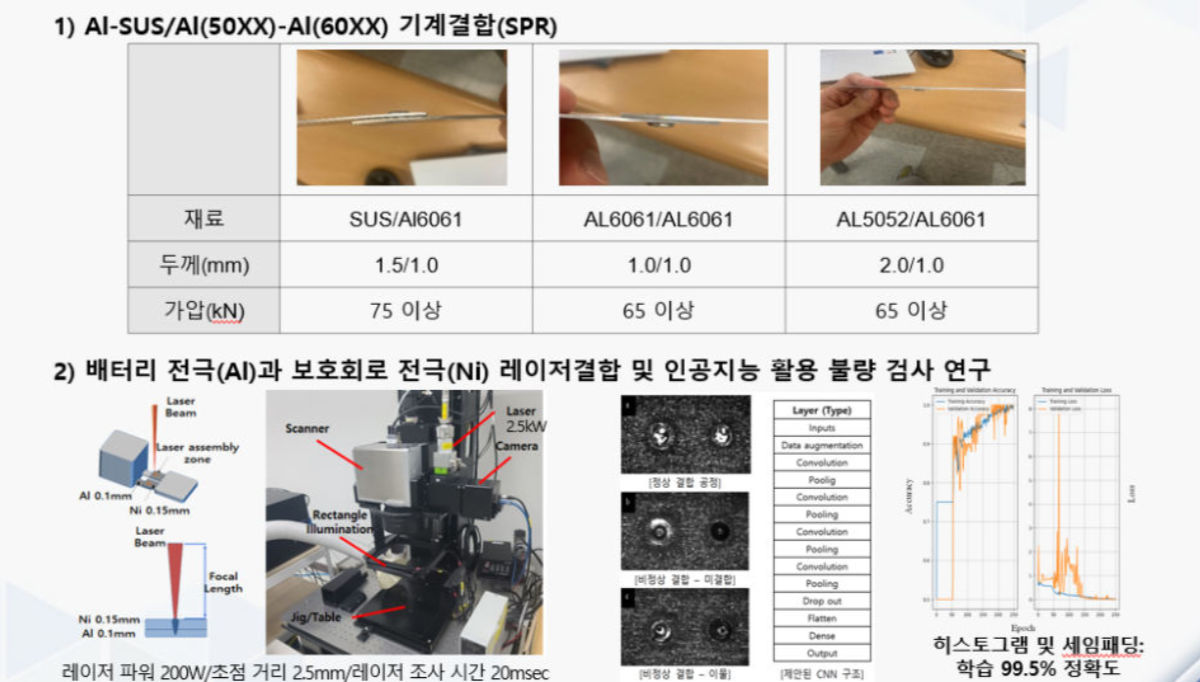
2. 이종소재 SPR 접합용 80kN급 서보 가압시스템 개발
3. In-Line 이종 소재 접착 공정 성능 평가 검사 장비 개발
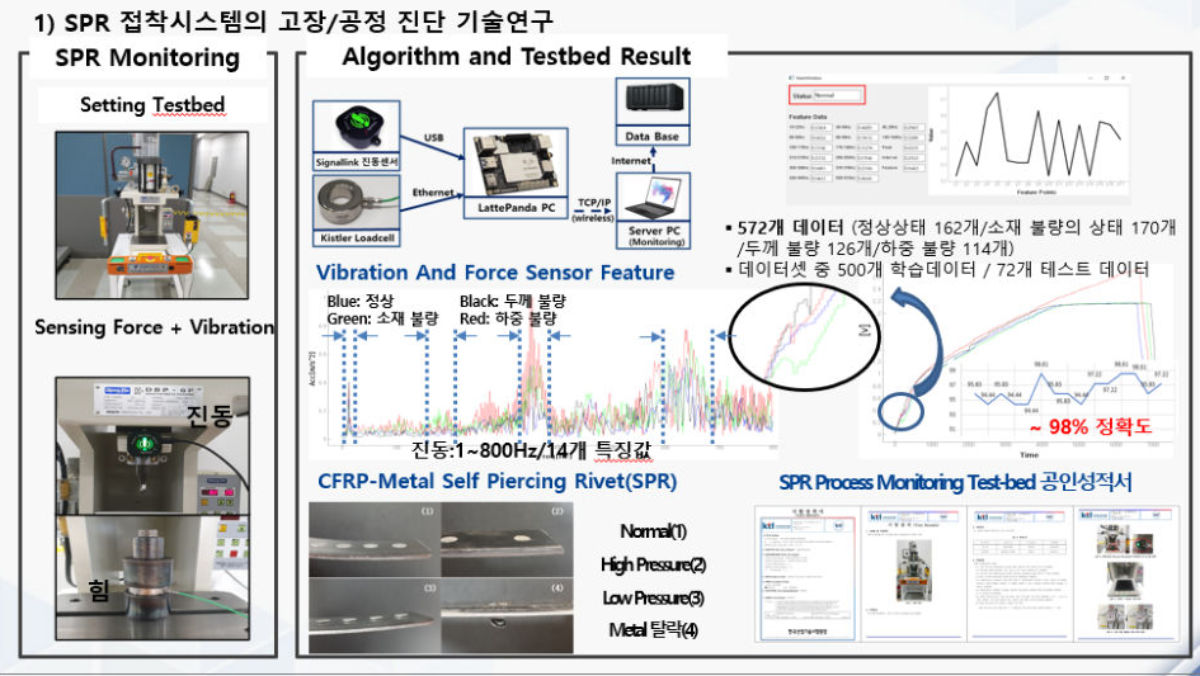
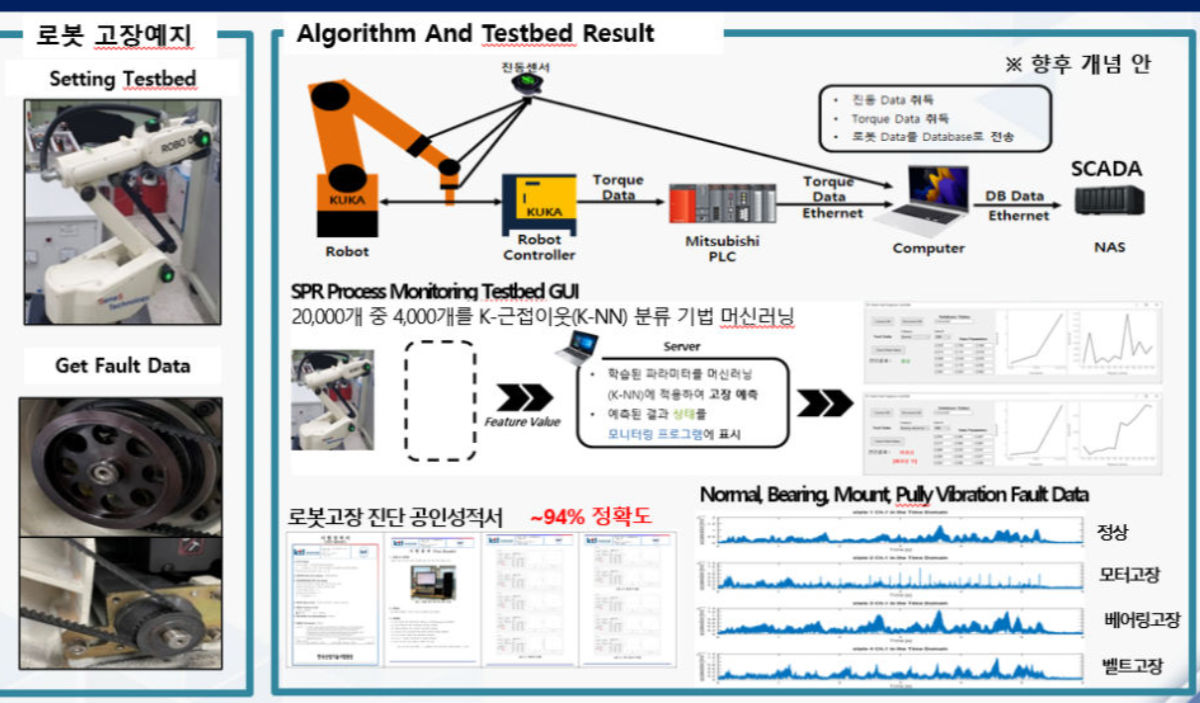
4. 로봇 고장 진단 및 예지 기술 연구
5. 로봇 워크셀(접착-접합-검사) 개념 설계
6. 이종 금속 접합 공정 추가 연구
GRRC Equipment Introduction
-

UR-1
-
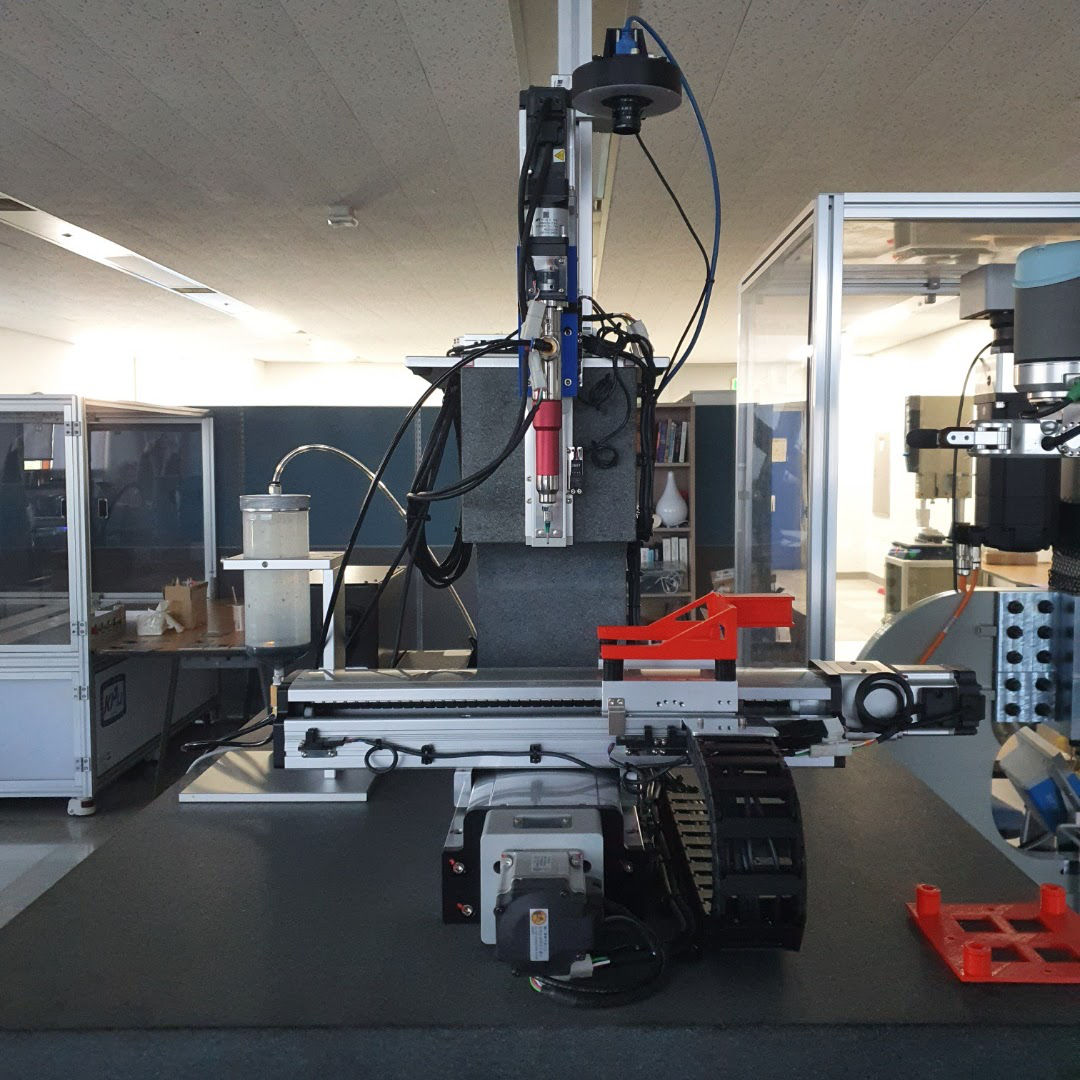
XYZ(3-State) Equipment
-

UR-2
-
SPR Equipment
Scenario demonstration video
Excerpt from presentation of seminar on June 3rd (Fri) 2022