PHM
Tilt Compensation of Wafer Transfer Robot to Prevent Scratches during Wafer Transport Y. K. JI, S. Islam Md ,S. S. Choi, H. S. Jang ,J. H. Shim, K. H. Kim, H. Y. Kim
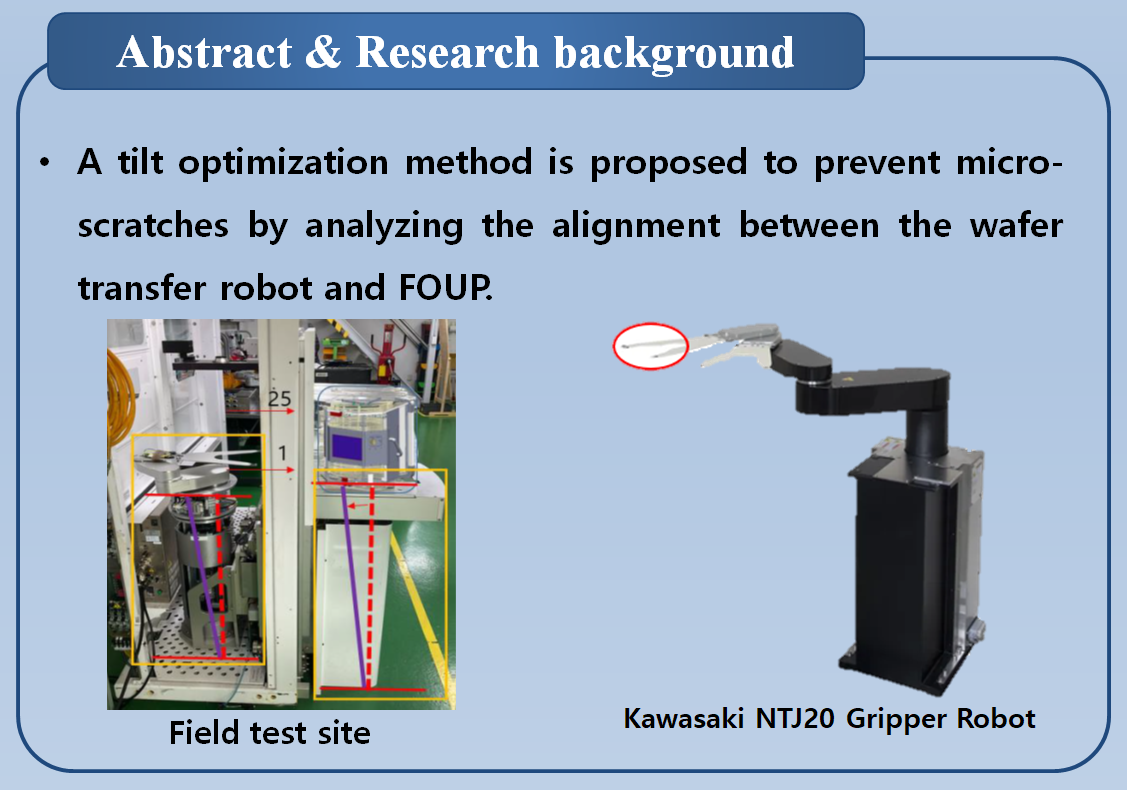
Abstract & Research background
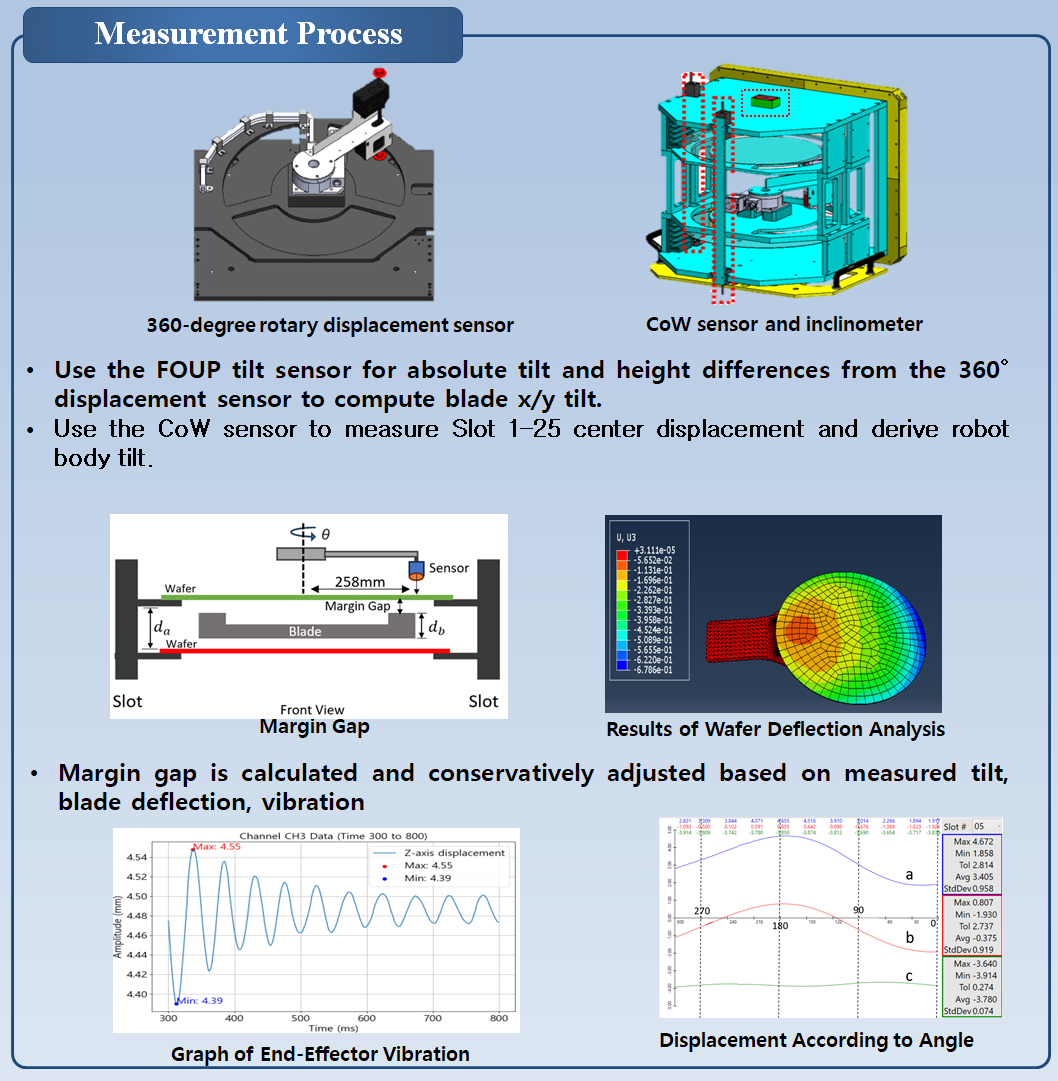
Measurement Process
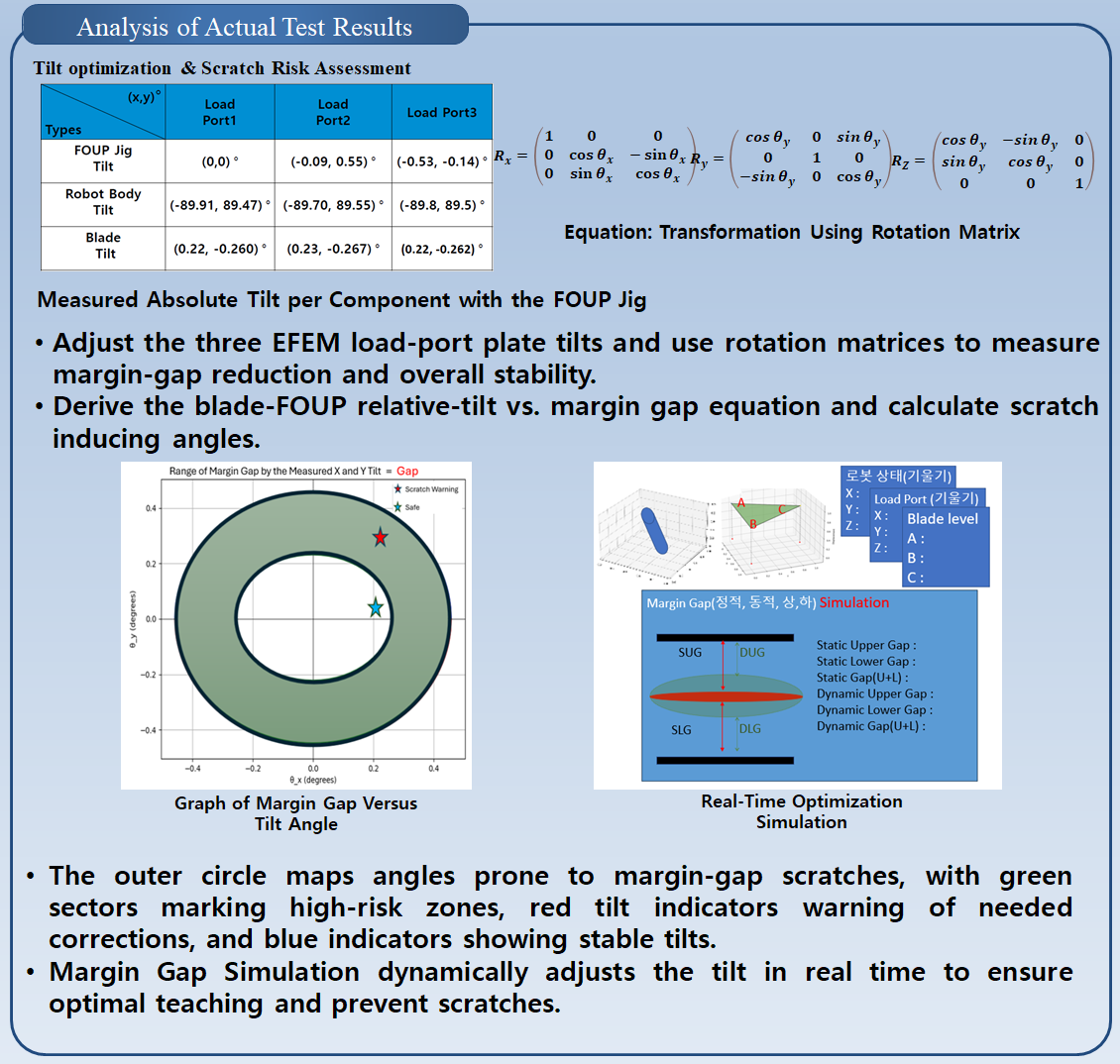
Analysis of Actual Test Results